Руководитель знакомит членов кружка с принципом действия следящей системы автоматического регулирования. В следящих системах заданная величина может изменяться в зависимости от какой-либо другой величины. Они представляют собой, по существу, автоматические регуляторы положения, в которых заданной величиной является угол поворота задающей оси, а регулируемой величиной — угол поворота выходной оси. Выходная ось как бы «следит» за положением задающей оси. Отсюда и происходит название этих систем.
Обязательной составной частью любой следящей системы должно быть устройство, преобразующее угол рассогласования между положением задающей оси и оси отработки в электрическое напряжение. Для этой цели используются различные датчики, в частности потенциометрические и сельсинные.Потенциометрический датчик представляет собой кольцевой потенциометр, к двум диаметральным точкам которого подводится напряжение питания. По потенциометру скользят три контактные щетки, смещенные на 120° одна относительно другой. От щеток отходят три провода, образующих линию связи. Иногда применяется модификация вышеупомянутой системы, отличающаяся тем, что потенциометр датчика имеет три фиксированные отпайки, расположенные через 120°, а подвод питания осуществляется через диаметральную пару щеток, связанных с задающей осью. При повороте подвижной системы датчика его щетки переходят с одних точек потенциометра на другие, имеющие другие потенциалы.
Сельсин-датчик представляет собой электрическую машину небольших размеров, схожую по конструкции и схеме с трехфазным синхронным генератором. В пазах статора машины располагается трехфазная статорная обмотка, фазы которой смещены в пространстве под углом 120° и соединяются в звезду или треугольник. Ротор сельсин-датчика имеет однофазную обмотку, к которой подводится питающее напряжение переменного тока. Переменный ток, создаваемый ротором, пронизывает фазные обмотки статора, создавая в них э.д.с. переменного тока, имеющие частоту питающего тока. В разных положениях ротора его поток по-разному ориентирован относительно фазных обмоток статора и вызывает появление в них различных по величине э. д. с. Так, например, если ось ротора совпадает с осью одной из фазных обмоток статора, то в ней наводится максимальная э. д. е., если повернуть ротор на 90°, то э. д. с в данной обмотке наводиться не будет; а если повернуть ротор в том же направлении еще на 90°, то э. д. с опять станет максимальной, но изменит знак.
Далее следует рассмотреть блок-схему и принцип действия следящей системы с потенциометрическими датчиками и сельсинами.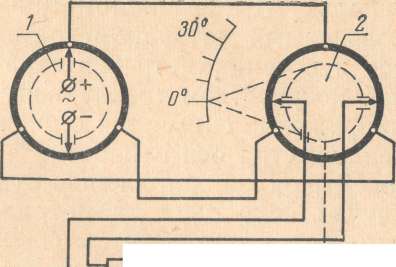
В приведенной на рис. 52 схеме следящей системы используется потенциометрическая передача с двумя кольцевыми потенциометрами. Потенциометр задающей оси и потенциометр оси отработки содинены между собой посредством трехпроводной линии связи. Выходное напряжение снимается с двух диаметральных щеток потенциометра оси отработки и подается на вход усилителя. Выходное напряжение будет равно нулю лишь в том случае, если пара диаметрально расположенных щеток приемника разместится перпендикулярно паре диаметрально расположенных щеток датчика. Подобные потенциометрические схемы могут работать как на постоянном, так и на переменном токе. Разница заключается в том, что в первом случае усилитель должен реагировать на сигнал постоянного тока, а во втором — на сигнал переменного тока.
В качестве второго примера следует рассмотреть упрощенную схему следящей системы с использованием сельсинов. Один из сельсинов используется в качестве задатчика, а второй — как измерительный орган (датчик положения оси обработки). При этом ротор второго сельсина не питается от сети, а наоборот, сам является источником напряжения, подаваемого на вход усилителя. Исполнительный двигатель остановится только тогда, когда напряжение на входе усилителя обратится в нуль. Это случится, когда ротор второго сельсина займет положение, перпендикулярное направлению поля статора.
Следящие системы, называемые иначе системы дистанционной передачи угла с усилительными элементами, применяются в том случае, если необходимо преодолеть значительный момент сопротивления на оси приемника или требуется обеспечить высокую точность регулирования. Если при этом выполнять вышеупомянутые условия не нужно, то задача может быть решена с помощью простой системы дистанционной передачи угла. Основными элементами такой системы являются: датчик (воспринимающий передаваемый угол), линия связи и приемник (воспроизводящий передаваемый угол).
Необходимость в дистанционной передаче угла встречается в различных технических устройствах. Так, например, диспетчеру, обслуживающему пропуск судов через шлюзы, необходимо иметь у себя на пульте прибор, показывающий, на какой угол открыты шлюзовые ворота. Летчику, выпускающему закрылки перед посадкой самолета, необходимо иметь прибор, показывающий угол открытия закрылков. Встречаются и другие устройства, у которых угол поворота не ограничен, как, например, флюгер, показания которого необходимо передавать в автоматизированную метеобудку, картушка компаса, положение которой передается на указатель штурмана самолета или корабля, и т. п.
Простейшая схема потенциометрической дистанционной передачи угла на постоянном гоке работает следующим образом. От щеток кольцевого потенциометра отходят три провода, образующих линию связи, через которую осуществляется питание приемника, состоящего из трех одинаковых катушек, расположенных под углом 120° одна к другой, и свободно вращающегося постоянного магнита, находящегося между ними. С осыо магнита скреплена стрелка, с помощью которой производится отсчет по шкале. При повороте подвижной системы датчика его щетки переходят с одних точек потенциометра на другие, имеющие другие потенциалы. При этом происходит перераспределение токов в обмотках приемника, меняются их э.д.с., и в результате магнитный поток, создаваемый обмотками приемника и направленный по его диаметру, поворачивает постоянный магнит со стрелкой на угол, приблизительно равный углу поворота оси датчика.
В схеме сельсинной дистанционной передачи угла сельсин-приемник имеет такую же схему, как и сельсин- датчик. Так как его ротор питается от той же сети, что и ротор датчика, то он будет стремиться занять положение, совпадающее с направлением суммарного переменного поля в приемнике. Поскольку это поле повторяет положение ротора датчика, то, следовательно, ротор сельсин-приемника всегда стремится занять положение, согласованное с положением ротора датчика. Один сельсин-датчик может работать на несколько сельсин-приемников.
Сельсины выпускаются промышленностью на различные частоты питающего напряжения — от 50 до 500 гц.
В заключение данной темы следует вкратце рассмотреть принцип действия следящей системы с релейным управлением. Датчиками заданного и отрабатываемого положений являются потенциометры. Между щетками потенциометров включен вход усилителя, выход которого питает обмотку поляризованного реле. Реле своими контактами переключает цепь питания двигателя, меняя направление его вращения.
Полученные сведения о принципе работы автоматических следящих систем члены кружка могут применить на практике. В качестве объектов для конструирования им можно предложить спроектировать и изготовить следящую систему для передачи угла указателя ветра автоматической школьной метеостанции; наготовить модель следящей системы автоматического регулирования; изготовить действующие макеты шлюза, разводного моста, стартовой установки ракеты с автоматическим указателем угла раствора или положения в пункте управления.